CRAZYFLIE NANO QUADCOPTER
Overview
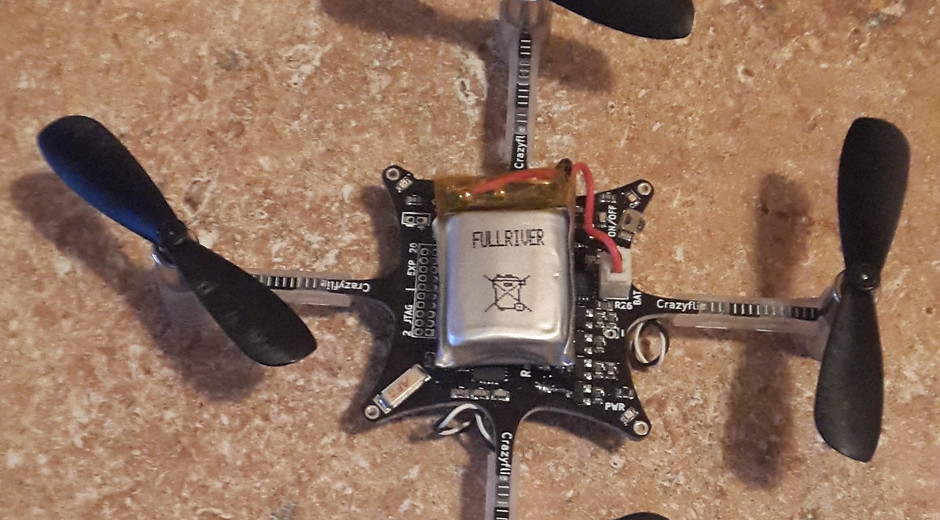
In this project, I built a small flying drone, called the Crazyflie Nano Quadcopter. It is one of the smallest in the world, weighing only around 19 grams and measuring only 9 centimeters across. Although small, it is very stable and is also capable of auto-leveling, thanks to the triple-axis gyro and the triple-axis accelerometer that it uses. I control the quadcopter using a PS3 controller, by connecting it to my PC. Using MotioninJoy to recognize the PS3 controller and enable it for use, I connect the controller to the Crazyflie PC Client, which in turn tells the Crazyradio what I want the quadcopter to do. This Crazyradio, a 2.4 GHz radio USB dongle, communicates with the quadcopter through a 2.4 GHz chip, which is located on the copter. I can tell the quadrotor helicopter how I want it to move, using the basic commands of thrust, roll, pitch, and yaw.
Assembly
The quadcopter was not too difficult to assemble. All I needed to do was to attach the motor mounts and the battery to the base. The most difficult part of the assembly was soldering the motors' wires to the back of the PCB. The holes on the back were very small, and I accidentally made a connection through the solder for one of the motors. I didn't realize this at first, and when I tried starting up the Crazyflie, only three of the four propellers were rotating. I had created a short circuit of sorts, since the solder from both wires was touching. To fix this, I had to heat the solder up again and use a solder sucker to remove the solder. After this, I carefully resoldered both wires back onto their respective holes, making sure that I had not made another connection through the solder.
The Controls
I was able to manually configure the controls for the quadcopter through the Crazyflie PC Client. Since I used a PS3 controller as the input device, I was able to configure the controls to where the left and right joysticks controlled the flight of the quadcopter. I was also able to assign certain buttons to set the roll trim and the pitch trim.
Flight
Flying the quadcopter takes some getting used to. It was a little difficult to control at first, but when I got the hang of it, I was easily able to maneuver the copter around rooms, under chairs, through hoops, etc. The quadcopter is also very stable.